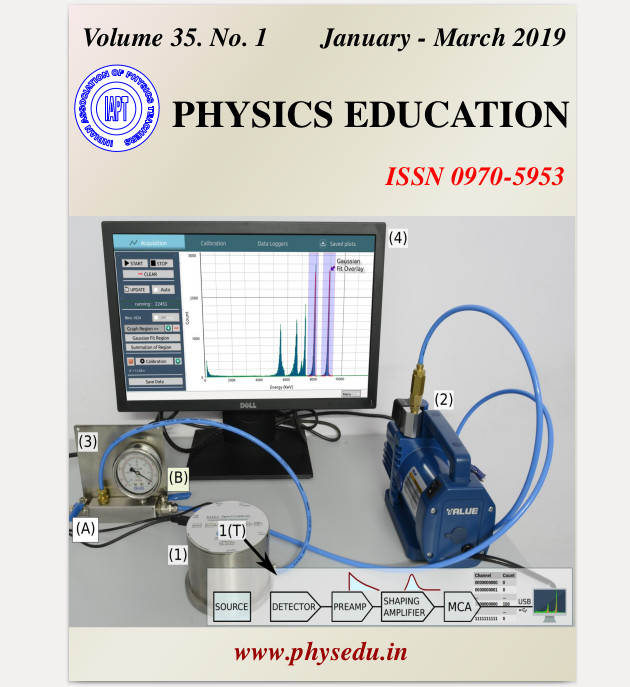
Alpha Spectrometer: AlphaSpec1K
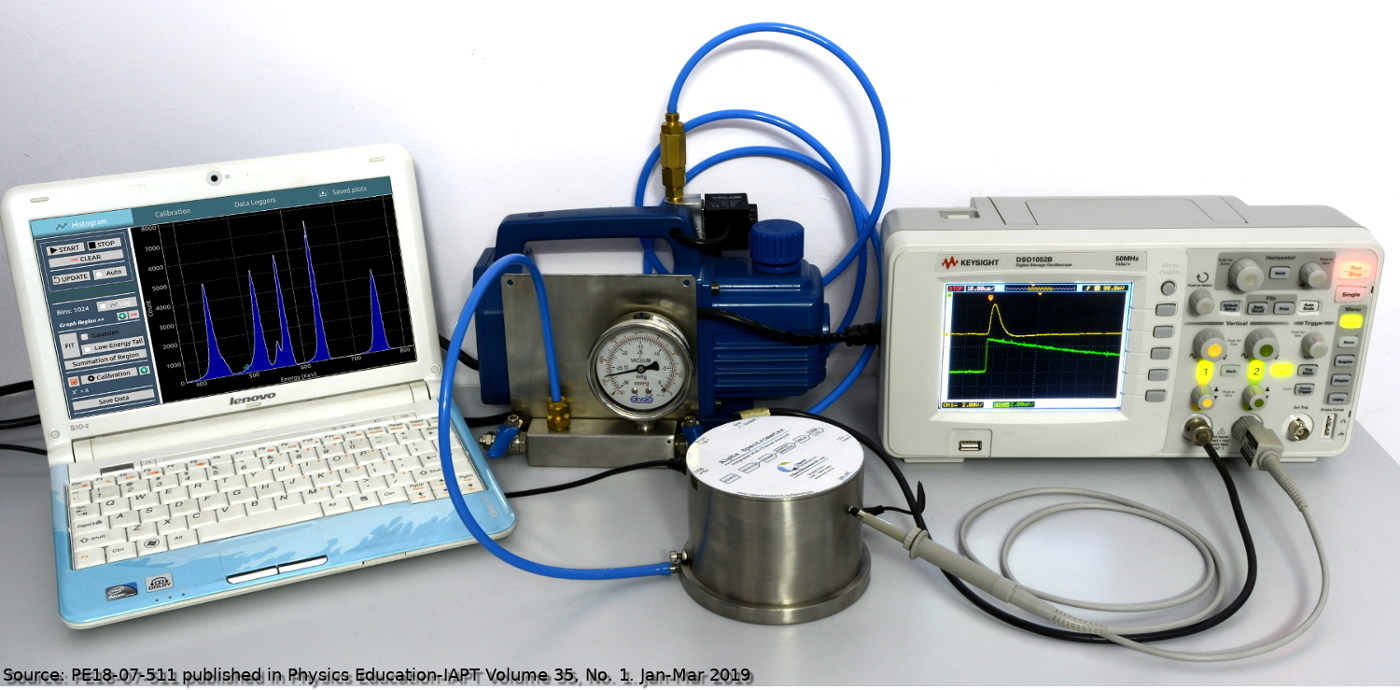
Acquire alpha particle spectra with a compact, and easy to maintain design with integrated detector, pre-amplifier, shaping amplifier, multi channel analyzer, and USB communications interface
Simplicity combined with maximum pedagogical value.
Detector Preamp Shaper MCA USB
Simplicity combined with maximum pedagogical value.
Detector Preamp Shaper MCA USB
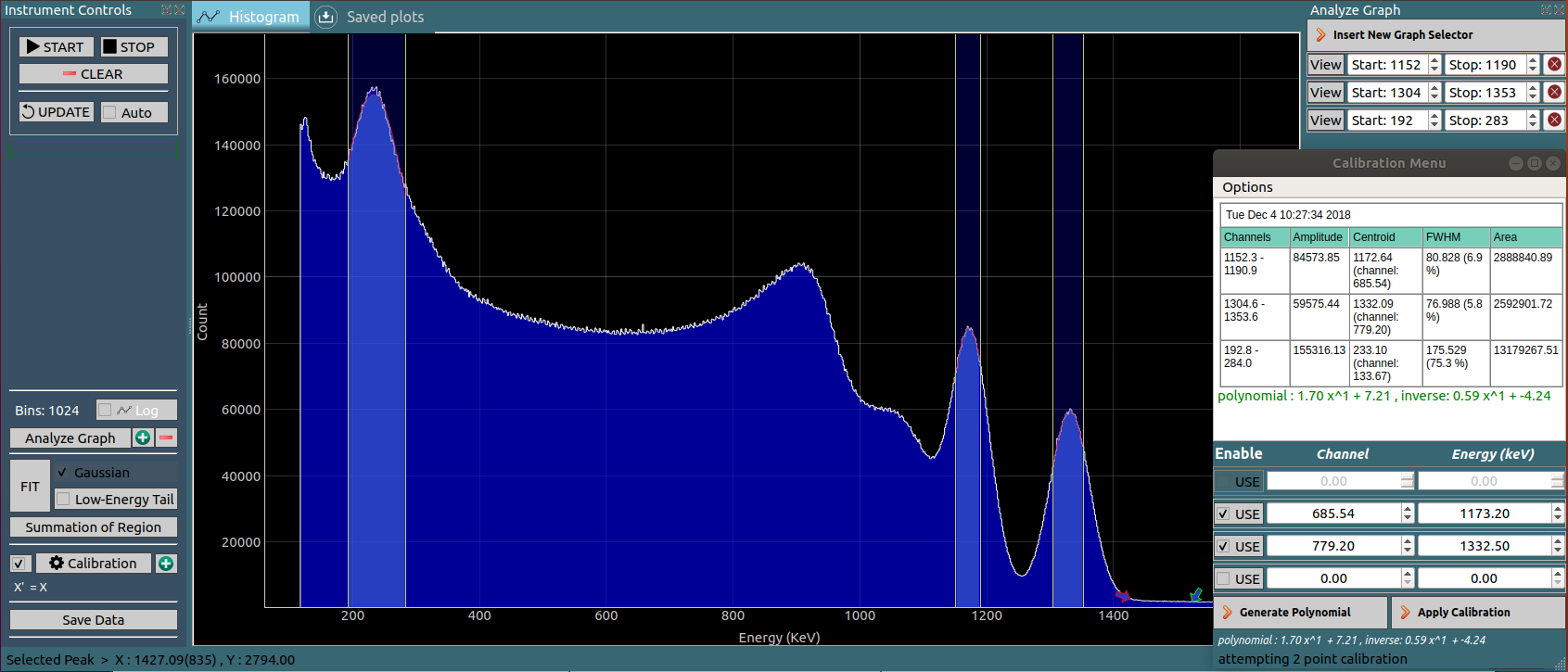
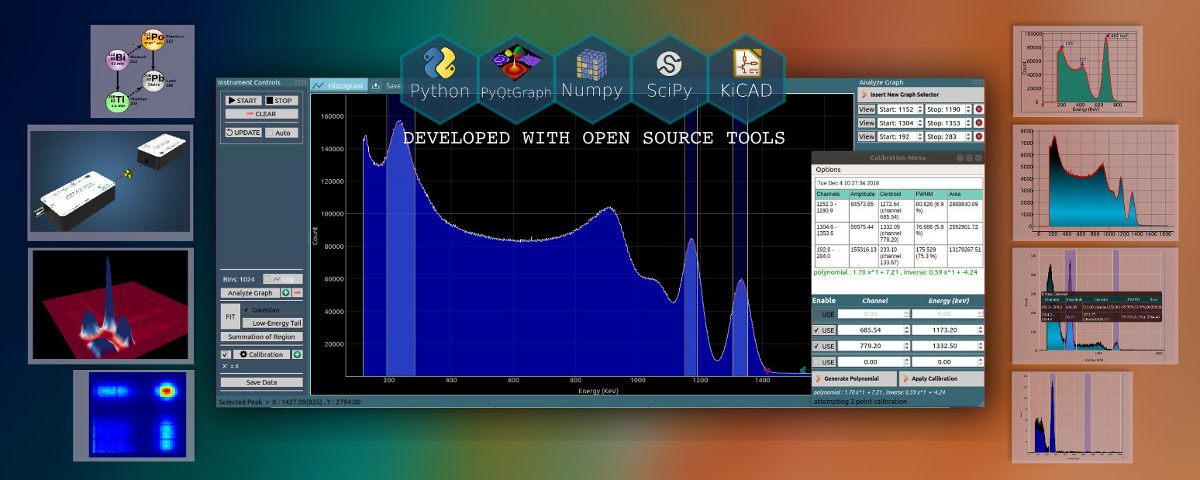
Software
INPUT
10 MeV full scale. Preamplifier and shaping amplifier units integrated.
1K MCA
USB powered 1024 Bin MCA included. 16 million counts per channel.
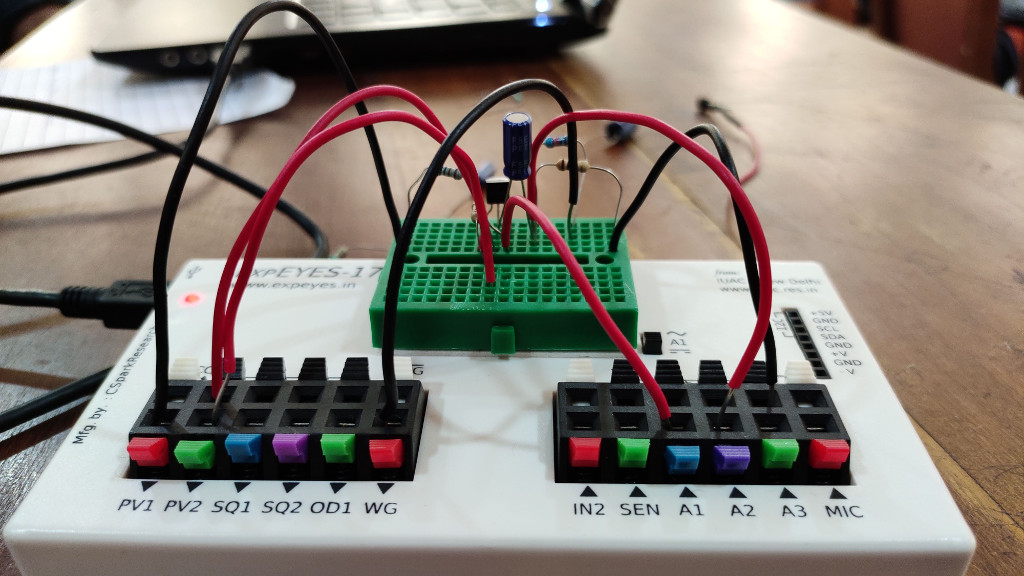
TEACHING
Monitoring outputs for preamplifier and shaping amplifier.
SOFTWARE
Fully featured Python software and library supplied open-source.
HARDWARE
Everything integrated into a compact, 1/2 litre, vacuum chamber